电滑板攻略 - 主控板程序
动力老男孩发布于 2015-05-21 22:22
这一部分内容也许会有点儿枯燥,对Arduino了解不多的同学,可能要先去预习一下。如果大家有需要的话,我也可以考虑发一系列Arduino的入门教程 :)
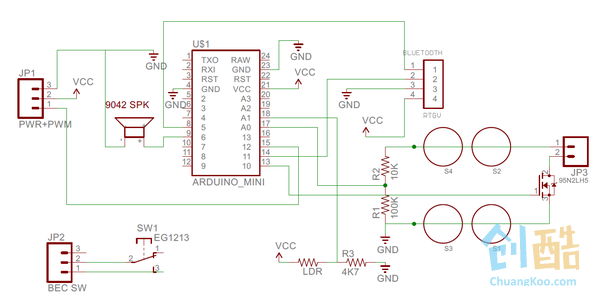
主控板是指的装在滑板上的那一部分电路板,首先贴一下电路原理图:
对着原理图,说说电滑板的几个功能:
1. JP1用来连接电调,这部分电路的供电也是从电调来来。说到这里顺便说一句,很多电调自带BEC功能,可以提供5V或6V的电压给单片机用。
电流可以支持到1A以上,带动各种传感器完全无压力。但是如果要点亮灯带或者响个大喇叭的话,就需要从电池直接引电压。
2. 标记SPK是个无源小喇叭,通过一定频率的方波来发出声音。
3. 中间那个方块就是Arduino pro mini,选用的是5V 16M的版本,它就是整个控制系统的“神经中枢”
4. Bluetooth就是蓝牙的插座,我们选用的蓝牙模块一共有6根针,我们用了最简的四根针方案,如果你需要修改蓝牙设置,得手动用夹子给Key针脚接高电平
5. LDR和4k7,是一个光敏电阻和一个4k7的电阻。一般的光敏电阻,电阻值随着光线的增大而减小,我们通过测量获取的电压,就可以评估当前的环境亮度。这样晚上天黑的时候,滑板的夜行灯就可以自动亮起来了
6. 那4个圆圈,它的目标是当主板需要采电时,把电池的正负极接到这里,然后再引出去。因为电压比较高电流比较大,所以一共4个大圆圈。
7. 圆圈边上的JP3,是用来接灯带的,因为我们用的是6S的电池,电压平时在24V左右,所以可以选用两条12V的灯带串联一下。
灯带边上是场效应管,你可以理解为一个电子开关,通过输入0或者1来关闭或打开灯带。
8. 左下角的JP2 是个独立的东西,它的作用是把原来电调的开关引到这个板子上来,避免甩着一个小尾巴(这个功能不用也可以)
代码如下,有些地方我写了注释,不好理解的地方请大家留言,我在后续的攻略里会继续介绍。
#include <EEPROM.h>
#include <Servo.h>
#include <SoftwareSerial.h>
SoftwareSerial mySerial(11, 5); //Product board
int motorPin = 12; // The pin output PWM to control motor
int motorPin2 = 0; // For the new board with 2 motors, if motorPin2 < 0, then ignore it
int hornPin = 10;
int hornOffTime = 1000; // Cannot use horn too long, must less than 1s
int hornStartTime = 0;
int power = 50; // Control pow value, from 0 to 100;
long lastRecvTime = 0; // If cannot recv control info in 0.2s, stop the moto
int shutDownTimeRange = 200;
int powerScale = 100; //if set the power scale by mobile
int testingValue = 0;
int lightMode = 2; // 1: on; 2:off; 3: auto
int lightCtrlPin = 10;
int envLightSensorPin = 1;
boolean lightStatus = false; // shutdown ligth by default
Servo powerServo;
Servo powerServo2;
// The Led pin for debug
int ledPin = 13;
int light = 1;
int counter = 0;
// Beep pin
int beepPin = 6;
boolean beepStatus = false;
// Connect to speaker
int tonePin = 6;
// battery pin
int batteryPin = 0;
float batteryScale = 11;
float batteryAlert = 3.5;
void setup()
{
pinMode(ledPin,OUTPUT);
pinMode(beepPin,OUTPUT);
pinMode(lightCtrlPin,OUTPUT);
pinMode(hornPin,OUTPUT);
powerScale = EEPROM.read(0);
if (powerScale <= 0 || powerScale > 100) powerScale = 100;
lightMode = EEPROM.read(1);
if (lightMode <= 0 || lightMode > 3) lightMode = 2; // default light off
Serial.begin(9600);
mySerial.begin(9600);
powerServo.attach(motorPin);
if (motorPin2 > 0) powerServo2.attach(motorPin2);
}
void checkBattery()
{
if (counter == 0 || counter == 200) {
int readValue = analogRead(batteryPin);
if (readValue > 5 && batteryScale * readValue / 1024 * 5 < batteryAlert * 6) {
digitalWrite(beepPin, beepStatus);
beepStatus = !beepStatus;
} else {
digitalWrite(beepPin, 0);
}
}
}
void updateCounter() {
counter++;
if (counter >= 400) counter = 0;
}
void switchLight()
{
if (counter == 0) {
digitalWrite(ledPin, light);
light = 1 - light;
//Serial.println(testingValue);
}
}
void sendPowerInfo()
{
if (counter == 0) {
mySerial.write((byte)(analogRead(batteryPin) / 4));
}
}
void loop()
{
long t0 = micros();
int readPower = -1;
while(mySerial.available()) {
readPower = mySerial.read();
lastRecvTime = micros();
digitalWrite(ledPin, light);
light = 1 - light;
//counter = 0;
if (readPower > 100) {
break;
}
}
if (readPower > -1 && readPower <= 100) {
// Normal status
power = readPower;
}
if (readPower == 255 || (lastRecvTime > 0 && (t0-lastRecvTime)/1000 > shutDownTimeRange)) {
power = 50; // 松手默认滑行
}
if (readPower > 100 && readPower <= 200) {
powerScale = readPower - 100;
EEPROM.write(0, (byte) powerScale);
}
if (readPower > 200 && readPower <= 203) {
lightMode = readPower - 200;
EEPROM.write(1, (byte) lightMode);
}
if (readPower == 204) {
digitalWrite(hornPin, 1); // start horn
hornStartTime = t0;
tone(tonePin, 4000);
}
//if (readPower == 205 || (hornStartTime > 0 && (t0 - hornStartTime) / 1000 > hornOffTime)) {
if (readPower == 205) {
digitalWrite(hornPin, 0); // stop horn
hornStartTime = 0;
noTone(tonePin);
}
// light control
if (lightMode == 1) {
// light on
digitalWrite(lightCtrlPin, 1);
lightStatus = true;
} else if (lightMode == 2){
// light off
digitalWrite(lightCtrlPin, 0);
lightStatus = false;
} else {
//auto
int envLight = analogRead(envLightSensorPin);
testingValue = envLight;
if (!lightStatus && envLight < 800) {
lightStatus = true;
}
if (lightStatus && envLight > 900) {
lightStatus = false;
}
digitalWrite(lightCtrlPin, lightStatus);
}
updateCounter();
switchLight();
checkBattery();
double T = 2500;
// if has power scale
double scaledPower = power;
if (power > 50) {
scaledPower = 50 + (power - 50) * powerScale / 100;
}
double len = 900 + scaledPower * 12; //(0~100对应总周期0.9ms~2.1ms)
powerServo.writeMicroseconds(len);
if (motorPin2 > 0) powerServo2.writeMicroseconds(len);
int leftMs = (int) (t0 + T - micros());
if (leftMs > 1500 && (t0-lastRecvTime)/1000 < shutDownTimeRange) {
sendPowerInfo();
leftMs = (int) (t0 + T - micros());
}
if (leftMs < 1) leftMs = 1;
delayMicroseconds(leftMs);
}
-----------------------------------
回到目录点这里
登录以发表评论
问一下你的电路板锂电池那地方要如何接还是要焊接
现在买的锂电池,应该有那种两针的小插口,插一下就好了
求遥控和接收器的图纸和您的联系方式 693377149@qq.com,谢谢
求遥控和接收器的图纸,1565481748@qq.com,谢谢
avrdude: usbdev_open(): did not find any USB device "usb"
烧录的时候出这个怎么回事啊
遥控器的能烧上,主板这块就烧不上了
回复 维尼熊 : 你USB没连好把
大哥 你的微信或者QQ是多少?
动力哥 同求一份遥控器PCB图纸!1334263926@qq.com 谢谢!
动力哥,想请教下,
您画的板子上A0~A3是指模拟口 2~13是指数字口是吗? 我记得数字口是不是只能输出高低电频吧,那为什么电调的信号线要接在12口上?
还有那个无源小喇叭是怎么控制的呢?高电平就叫低电平就不叫是吗?
还有一个,蓝牙那个四针的就是rxtx接两个模拟口模拟板子的rxtx是吗?
有个特别不好意思的问题……电调玩爆了 啪的一声就不亮了 情况是开着电调 然后同学在板子上面空滑动 请问这是什么情况呢? 然后还想问下QAQ遥控器的接收器坏了找谁能修修呀 卖家不管QAQ
反向电压太高烧了……
估计是电调的做工不太好,具体的可能需要看你用的是什么电调了。如果你用航模的电调,它本来就不是为滑板设计的,就特别容易烧。
我也想要手持遥控器和接收板的电路图可以发一下吗 1030709627@qq.com
动力哥 你确实需要发一些Arduino入门教程了
我倒是想发一些,但是想了一下,现在的arduino教程已经非常多了啊
回复 动力老男孩 : 对于小白来的我 遥控器那块 太难做了
你遥控器有成品吗
回复 - 。- : 没有啊,做一个太费劲了,那个鸡腿花了我好几天时间
回复 动力老男孩 : 那有没有那个遥控和接收器的pcb的图纸?
回复 - 。- : 有用eagle做的文件
回复 动力老男孩 : 发我邮箱 行么 1356585513@qq.com
回复 动力老男孩 : 谢了 动力哥
回复 动力老男孩 : 动力哥,我用您的电路搭好,程序也烧进去了,用了手机app控制。但是电机不动!

回复 动力老男孩 : 同求一份遥控器PCB图纸!h568018728@gmail.com 谢谢!
回复 动力老男孩 : 你可以帮我调一个程序吗?出错:redefinition of 'void setup()'
arduinoIDE上传时出现了这样的错误:
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x9c
在网上找了很多方法都还是有这个问题。。
请问下你有没有出现这样的问题啊?
不知道怎么滴。。试了好多次之后突然就成功了
回复 达达_shshn : 经常遇到这种情况,貌似是windows下的驱动有问题,我严重怀疑是微软有自动升级驱动的机制
在45行那里:redefinition of 'void setup()'
不知道出了什么问题
又试了一次,没有error了
等这几天闲下来就跟着开始捣鼓。
热烈欢迎!
什么时候张罗一起定制一下吧?
不知道怎么宣传,人太少 :)
有不少人的呢~
回复 稀奇 :对啊 有不少人呢
动力哥,能先把手机端app传给我下嘛?已经自己打板完成硬件电路了,想测试一下
你的邮箱?
给我发站内信哈
回复 动力老男孩 : 已发送,嘻嘻,等待更新中
回复 动力老男孩 : 动力哥,pcb已经画好了,坐等修复bug,实在没这个能力
回复 Mrsails : 好的,我看看
回复 Mrsails : 手头没有安卓手机,看了下代码,设置灯带常亮的时候,输出是201,感觉应该是对的。
你的电路是怎么设计的?灯带的场效应管(或继电器)是否接在D10上?
回复 动力老男孩 : 现在两个问题,第一个是电机低速会卡顿(很严重),第二个是喇叭关不上。还有动力哥,最好加上一个12864液晶屏显示电池电压和行驶里程。我手里没有场效应管,所以用的是三极管代替,可能是这个问题
回复 Mrsails : 三极管虽然跟场效应管差不多,但是这个24V的电压,恐怕搞不定吧?
电路图漂亮,收藏慢慢研究。
作者的最新随笔
-
愚蠢的地球人:为什么太阳和月亮看上去一样大?
2016-12-12 17:11发布
-
手机端遥控程序
2016-01-23 23:48发布
-
电滑板攻略-手持遥控器
2015-06-08 23:45发布
-
电滑板攻略 - 主控板程序
2015-05-21 22:22发布
-
电动滑板攻略 - 蓝牙控制原理
2015-05-18 19:10发布
阅读数: 22728
