奔跑吧,机器人
思佳发布于 2015-06-18 19:27
话说我是创酷网号召大家为残疾人做机械外骨骼被吸引来的,可是没有看到这个项目的进展啊,还好在这里看到很多有趣的东西,也算有些收获,同时觉得不发一篇凑个热闹实在不符合我的性格。
去年就看到一款机器人,觉得挺好玩,或者这种设计理念可以用在助残机械外骨骼上,所以虽然有点老,还是分享出来,大家讨论一下吧。
Kickstarter上的链接在这里:https://www.kickstarter.com/projects/138364285/outrunner-the-worlds-most-advanced-running-robot
跑步机器人很酷的外观:
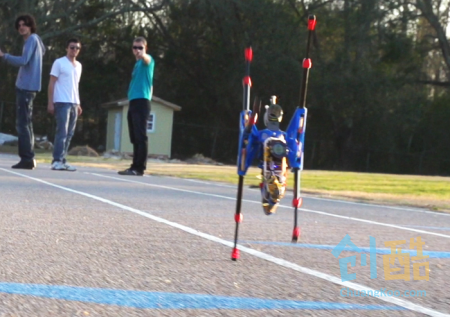
来一张奔跑在路上的:
这个机器人最高时速20迈,续航可达两个小时,挂了个摄像头,干点啥随你。总的来说,还是挺酷的,下面的视频作证(警告:片长大约两分多,干掉我几兆流量)
详细情况各位大哥大姐直接去Kickstarter看,我想说的主要是它的脚丫子。
奔跑机器人的脚丫子方案是:
三条120度分布的有弹性的腿,两侧各一组,两组装配的时候均匀错开(夹角60度)
这种方案貌似启动比较困难,请大家仔细看视频,好像要有初始速度哦
所以我想到:或者可以用轮子替代直杆,就像妈妈买菜用的那种拉车的轮子一样,这样稳定性应该可以提高,启动问题可以解决,而且可以上台阶,用于助残机械外骨骼是不是也可以呢?不过,马达带动哪个部件转动是个事,哈哈。
不管了,请大家帮忙想想助残机械外骨骼的移动方案吧。
登录以发表评论
这个 较轮子的优势在哪里?
这个这个这个……
帅到没有朋友啊
刚来,准备交100个朋友,限量,哈
阅读数: 6282
